Arthroscopic CAMA
We performed the first arthroscopic CAMA on the human knee.
Computer Assisted Mosaic Arthroplasty (CAMA)
Surgical User Interfaces
Volume Visualization
Cartographic Visualization
Meshing for Computer Modelling
Computer Graphics
All papers
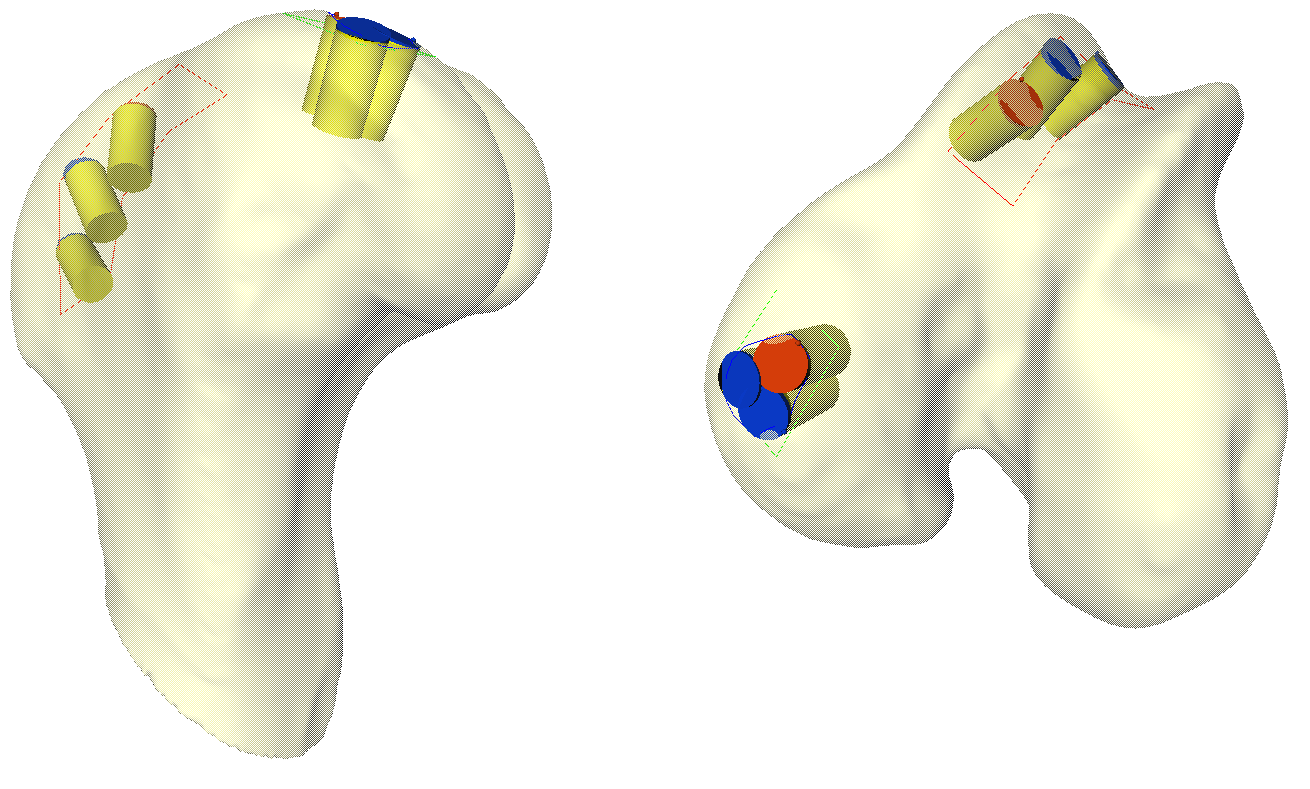
Mosaic arthroplasty is a surgical procedure to repair a cartilage defect. Small plugs of cartilage and bone are transplanted into the defect from a non-load-bearing part of the joint.
The procedure is technically demanding, requiring that (a) the original cartilage surface be determined, (b) a set of plugs be found to reconstruct that surface, and (c) the plugs be harvested and placed very accurately.
Conventional mosaic arthroplasty is done manually and has
variable results. Our research provides better surgical outcomes
through computer planning and computer guidance.
We performed the first arthroscopic CAMA on the human knee.
We performed the first template-guided CAMA on the human knee.
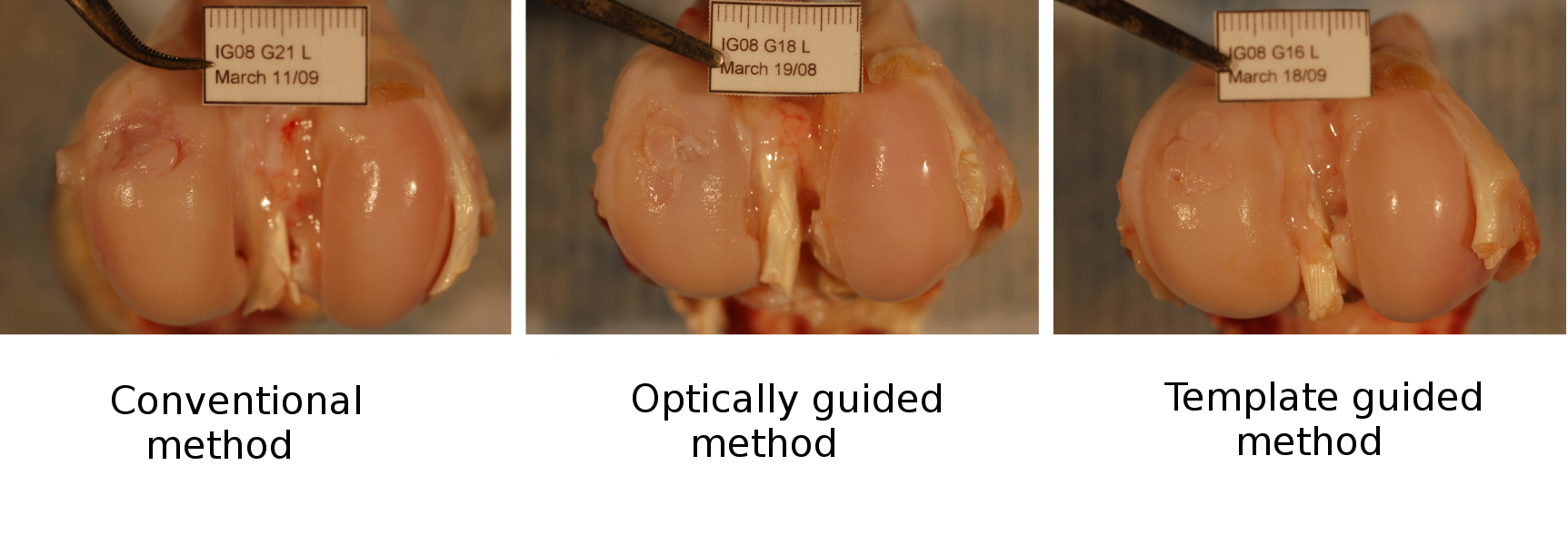
An animal study showed that computer-assisted methods outperform the conventional method in mosaic arthroplasty.

A comparison of three methods of predicting the original cartilage surface over a defect found that a cubic spline gave the best results.

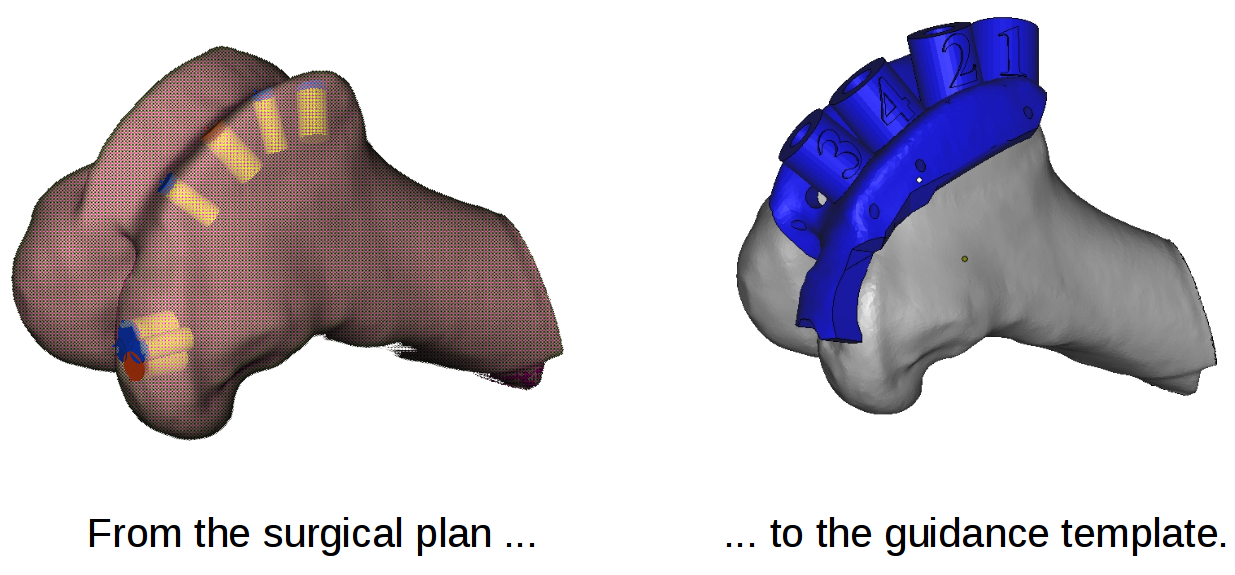
A computer application was built to automatically create guidance templates from a surgical plan. This application reduces the time required to create templates, ensures consistency, and encodes design principles that would otherwise exist only in the designer's mind.
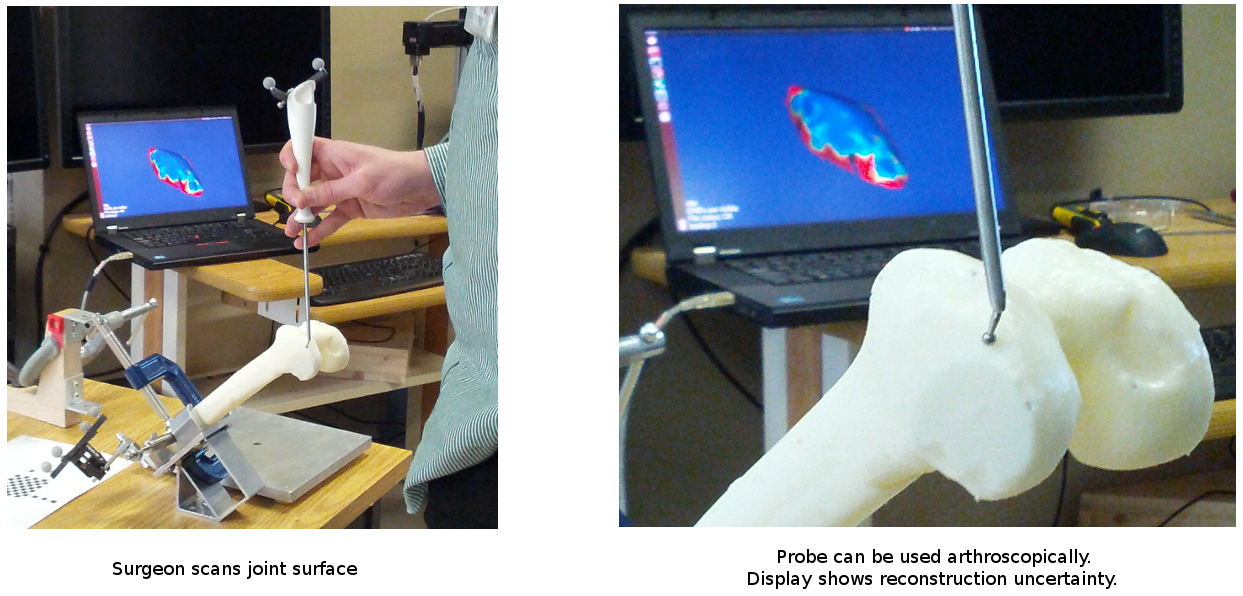
The surgeon can pass a tracked surgical probe over the joint surface to intraoperatively build a computer model of the surface, which can then be used to automatically build a surgical plan in the same operation. This eliminates the need for a pre-operative CT and reduces the error when tracking surgical instruments.
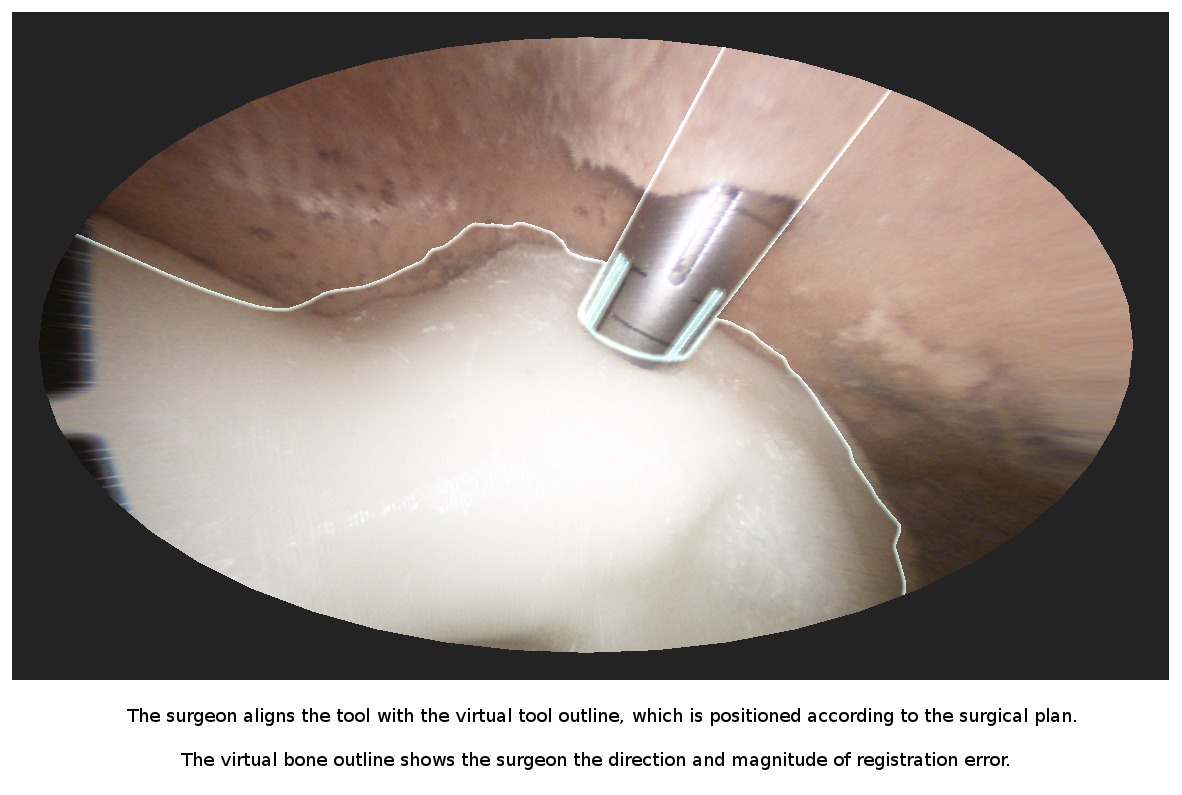
We superimpose the surgical plan onto the patient's anatomy as seen in the surgeon's arthroscope view. This eliminates a second display and allows the surgeon to view the patient and surgical plan simultaneously.

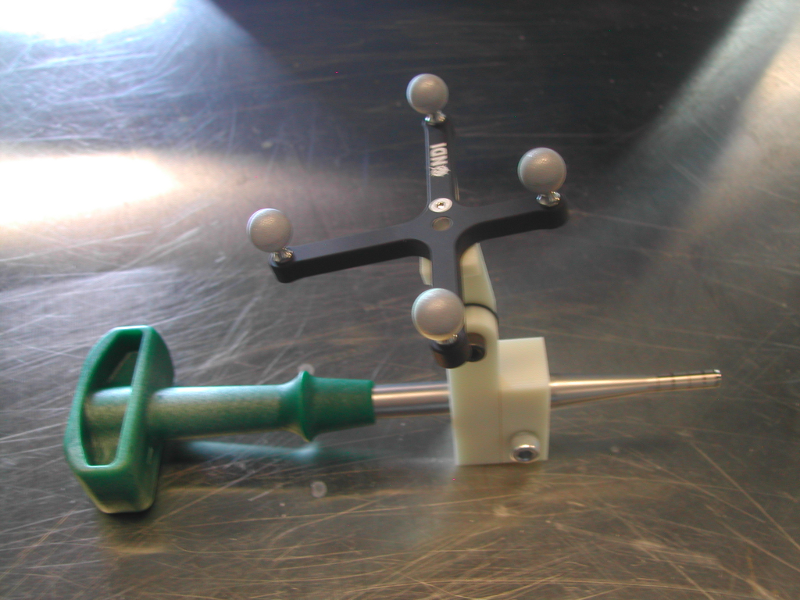
We designed and 3D-printed a magnetic, joystick-like device that allows the surgeon to directly control the computer using a sterile, tracked surgical probe, a common tool in the operating room.
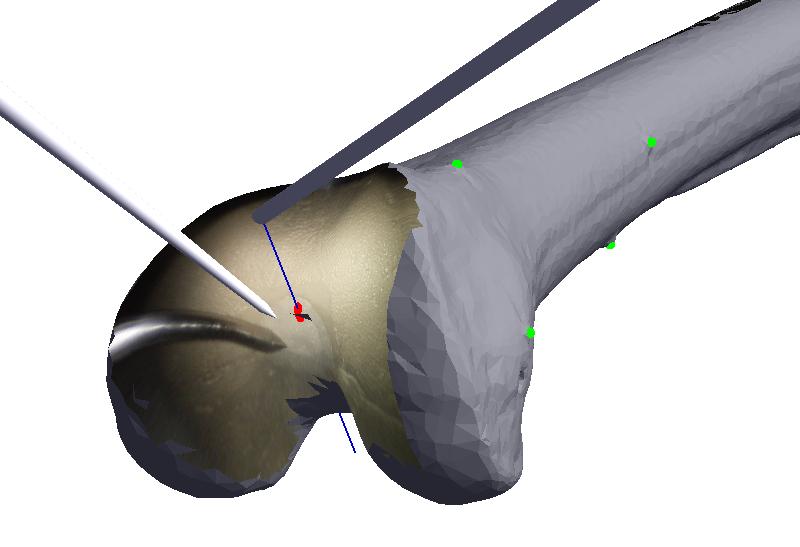
Our arthroscopic training system shows a virtual 3D view of the interior of the joint and projects the arthroscope image onto the virtual bone. We found that the 3D view improved target acquisition in novice residents.
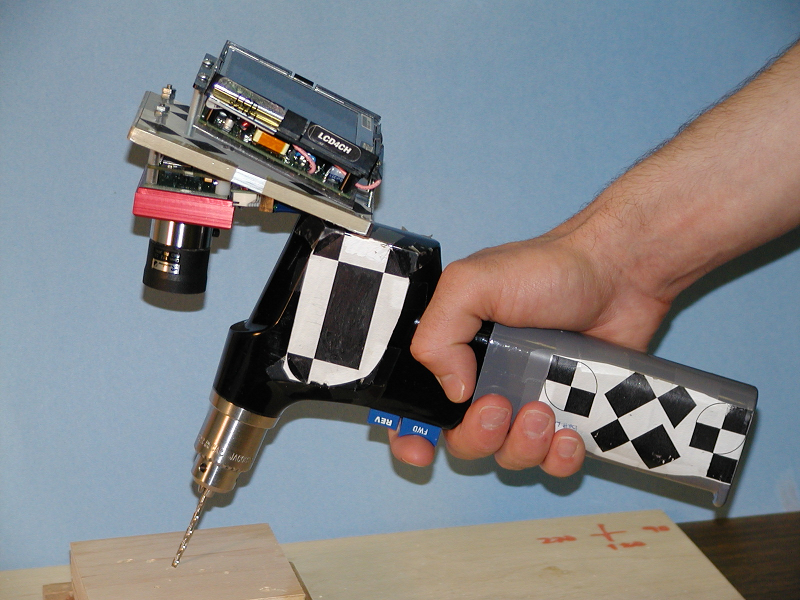
With our tool-mounted guidance display, surgeons do not have to look away from the patient when sawing or drilling under computer guidance.
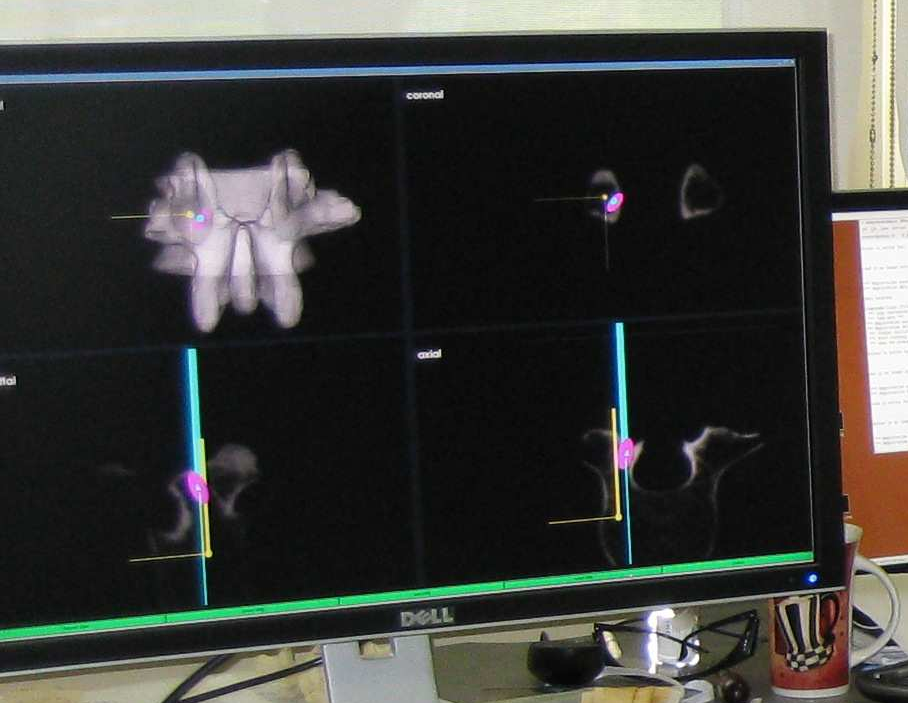
Uncertainty is present in all surgical computer guidance systems, but is rarely shown in a meaningful way. We developed several methods of providing uncertainty information on the guidance display. For the delicate task of inserting screws into the spine, we showed that surgeons were able to correctly interpret the uncertainty information and that the extra uncertainty information on the guidance display did not adversely affect surgical performance.
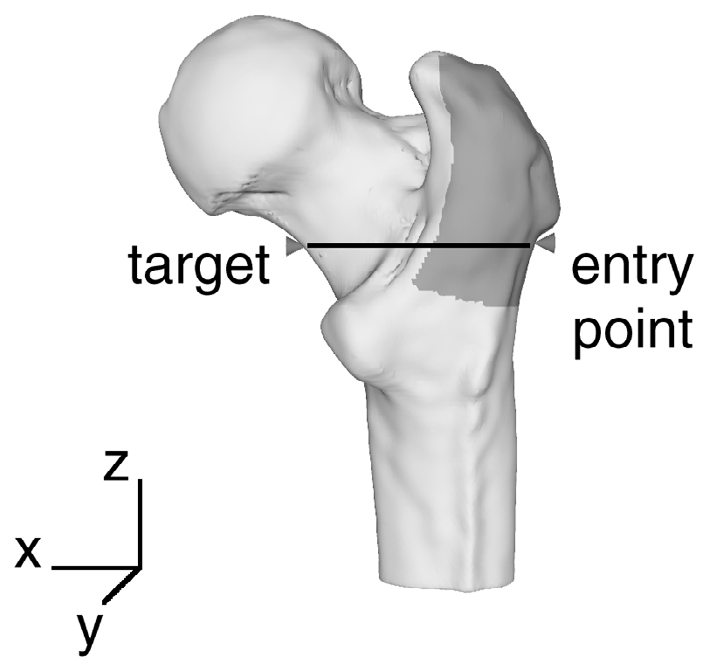
A study of the simulated excision of an osteoid osteoma showed that the presence of uncertainty information improved some measures of surgical performance.

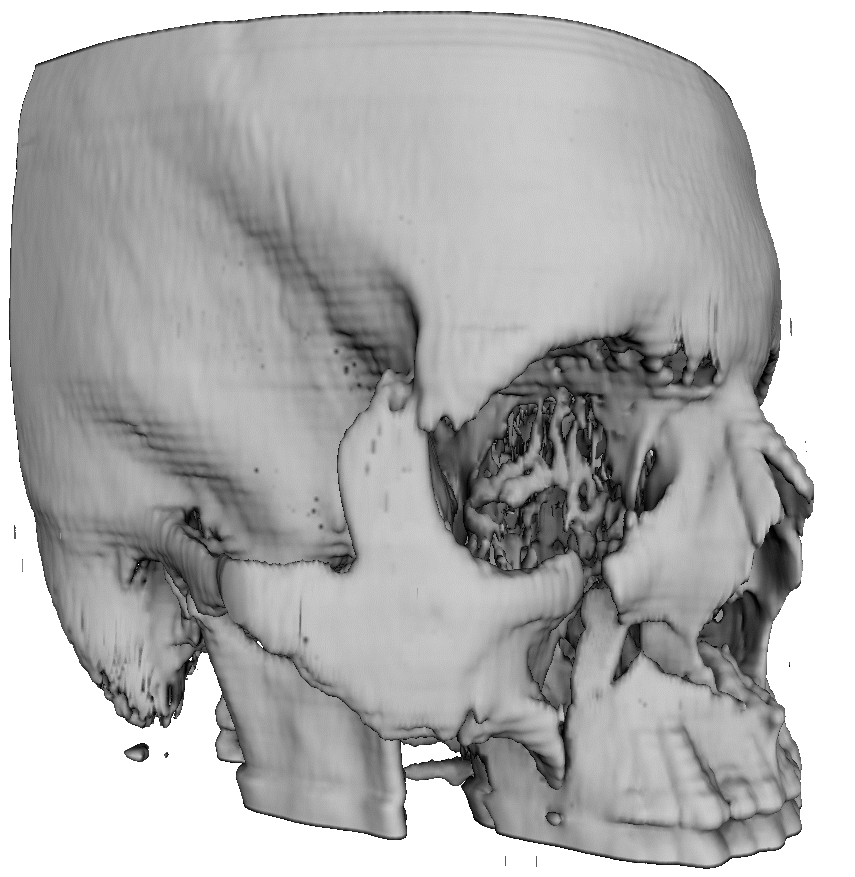
We found that stereopsis and simulated aerial perspective could improve depth perception in CT volumes. Surgeons make use of CTs in planning and performing operations, so an improvement of depth perception in CT volume rendering may help diagnosis and surgical planning.
A shading model for volumetric data is described that enhances the perception of surfaces within the volume. The model incorporates uniform diffuse illumination, which arrives equally from all directions at each surface point in the volume
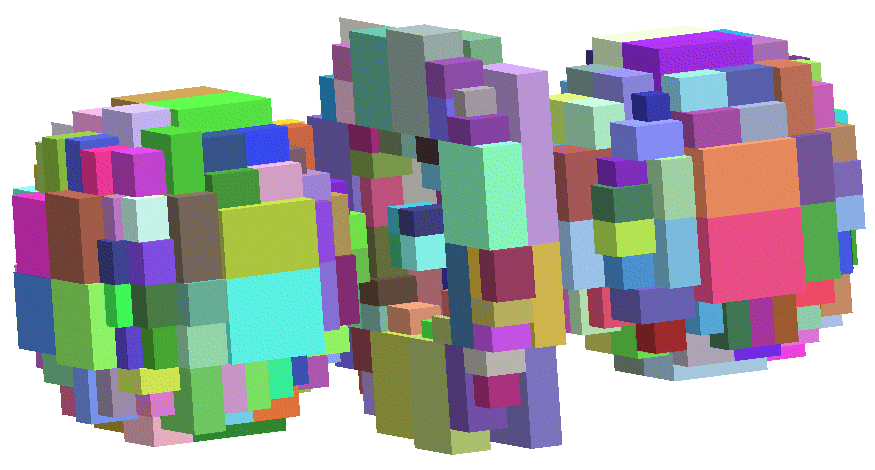
An new volume rendering algorithm efficiently exploits empty regions in the data set to speed up rendering.
Different sky models can be used to highlight different terrain features and to give a better perception of the 3D terrain in a 2D image. We describe a number of sky models and provide a computer application to compute sets of point lights that illuminate the terrain under these models.
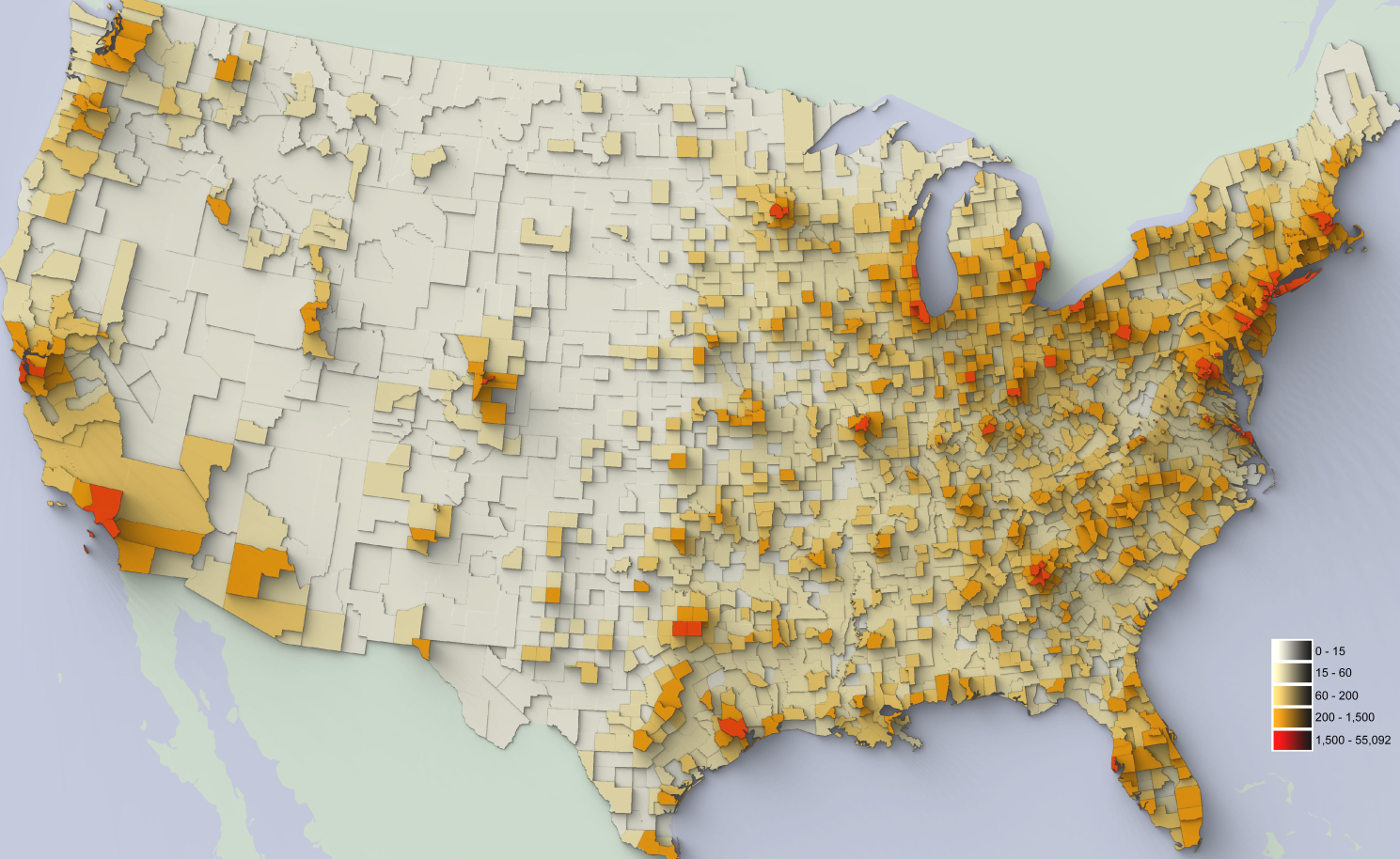
A choropleth map shows a data distribution on a map using differently coloured classes for different ranges of the data. We show that soft shadows can be added to show differences within a class.

We show that a "cloudy day" illumination model can provide better 3D perception of 2D LIDAR images, such as a city image acquired from a satellite.
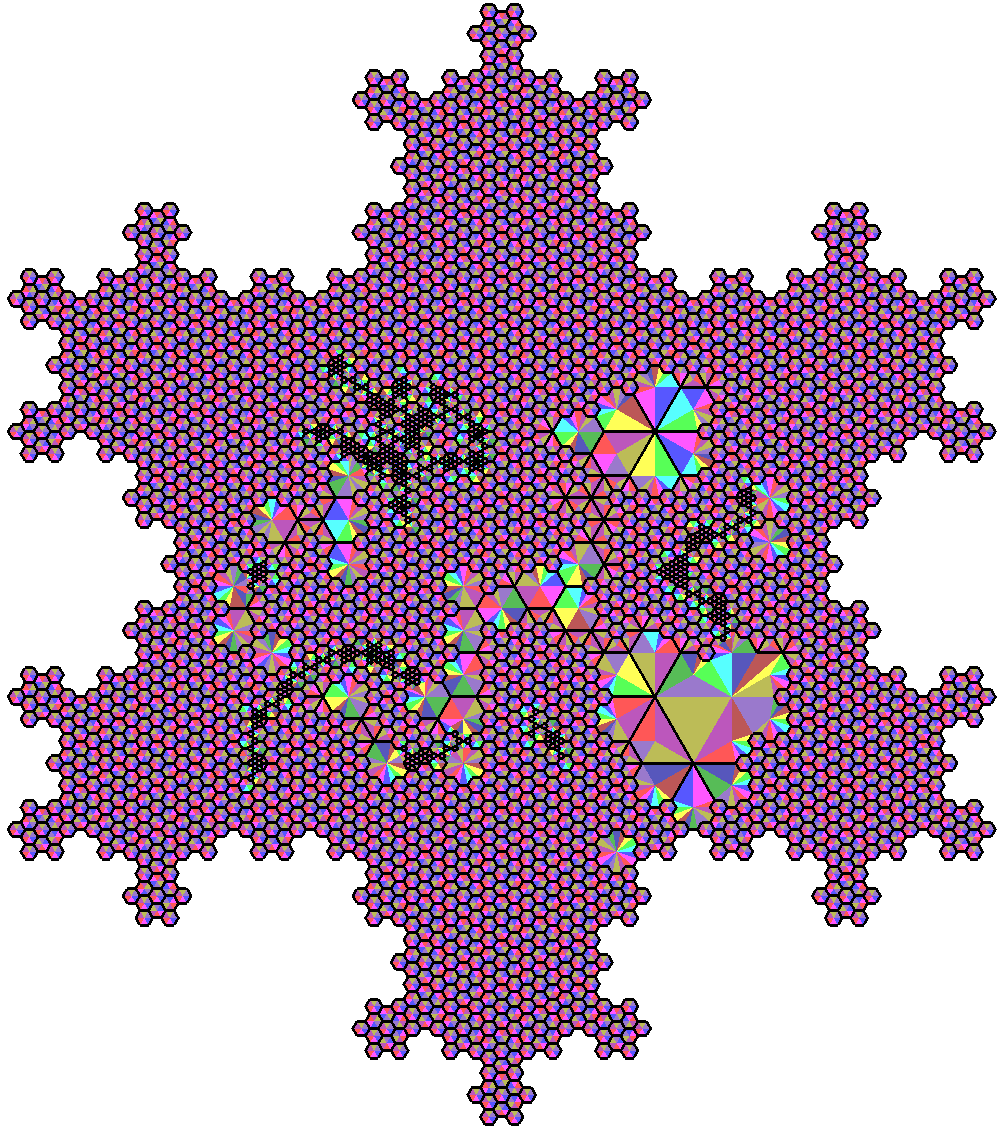
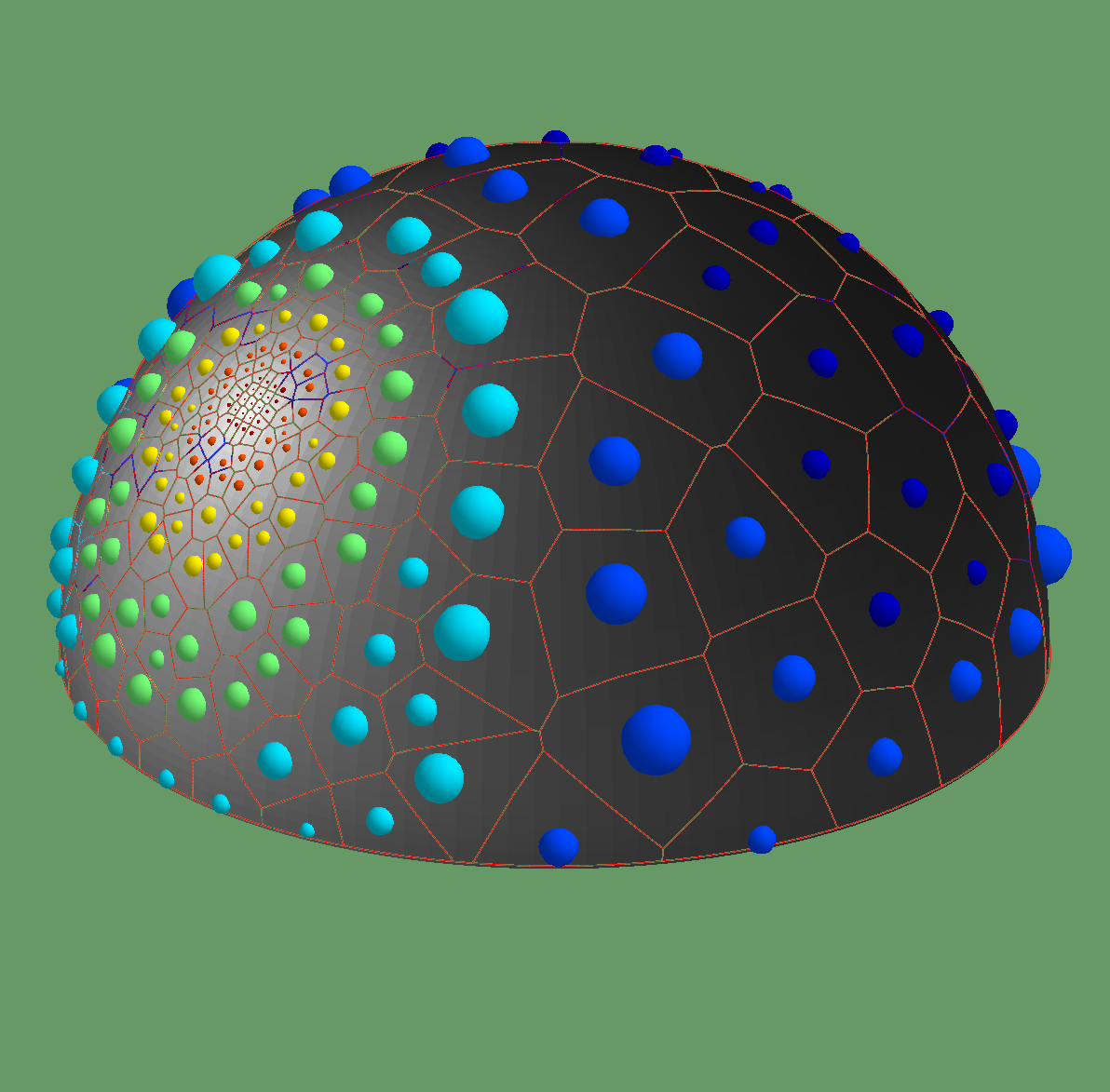
Hierarchical hexagon meshes have several advantages over the standard "latitude/longitude" mesh when modelling the Earth's surface. We developed an algorithm to triangulate a hierarchical hexagon mesh so that it can be rendered on the computer screen.
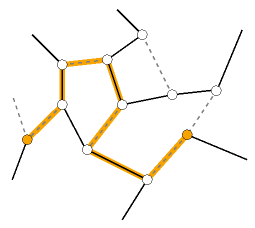
A method to build and maintain a good set of triangle strips in both static and continuous level-of-detail (CLOD) meshes. Update: A new tunneling algorithm has been developed which performs much better than the one described above (see "results" link above).

A constraint based automatic placement system, which allows the user to quickly and easily lay out complex scenes using constraints, pseudo physics, and a semantic database.
An efficient algorithm for the computation of the horizon at every point on a terrain. The horizon is used for occlusion culling and for realistic shading.
A robust, hardware-accelerated algorithm to compute an approximate visibility map, which describes the visible scene from a particular viewpoint. This has application to discontinuity meshing.


An algorithm to maintain the sequence of lines visible from a moving viewpoint in the plane. The algorithm usedes space linear in the number of visual discontinuity lines.