|
|||
|
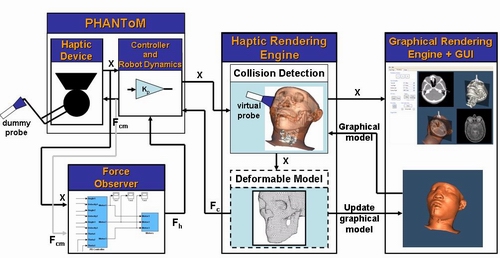
System Structure System prototype consisting of a SensAble Technologies PHANToM 1.5A Premium haptic device and a computer workstation with dual monitors was developed in our laboratory. Using PHANToM haptic device, real-time interaction was provided for the user in terms of re-slicing and haptic force feedback. As shown in the Figure, the setup consists of four major components: PHANToM, Force
observer, Haptic rendering engine, Graphical rendering engine and GUI. The user is physically interfered with PHANToM robot via a dummy probe mounted on the
robot. PHANToM consists of the haptic device and its controller. The user hand
(dummy probe) position (X) is captured by PHANToM encoders and is passed to the
"Haptic-Rendering Engine". The engine is provided with a graphical model of the patient anatomy and a virtual probe (in VRML format) as well as the current position
Graphical User Interface A Graphical User Interface (GUI) is provided in the "Graphical-Rendering Engine" to visualize and interact with the graphical model of the examined tissue, as well as displaying the corresponding 2D re-slices in different modalities of the pre
registered data sets. The GUI allows the operator to move the 3D view point of the
rendered volume data, as well as zooming in and out within each rendering window,
independently or simultaneously. Capturing snapshots and saving them on disk, same
as current commercial ultrasound imaging systems is also another capability of the Current implementation of the system provides static force feedback to the operator's hand. However, deformable volume sets would more realistically simulate interactions with the patient. We have divided this task into two components: (a) new implementation of volume sets considering deformation using any method such as Finite-Element Method (FEM) which is considered as a future work. (b) Contact force estimation needed to calibrate deformable models of the anatomy and to control PHANToM. As shown in the Figure, the "Force Observer" block receives PHANToM control command (Fcm) and current position of the dummy probe to estimate the operator's hand force (Fh). In the new configuration, instead of applying constant force, the PHANToM controller receives variable virtual anatomical contact force from deformable model and the user's observed force to calculate the control command. The deformable model also provides an updated graphical model based on the result of the deformation algorithm. Human Factors Study The ergonomic effect of the prototype system has been demonstrated by means of a pilot human factors study. The study gathered qualitative information from user questionnaires and performed a quantitative comparison of the conventional ultrasound training methods versus training using the designed system. It also evaluated the performance of the system as a diagnostic examination system. Results demonstrate satisfactory performance in terms of haptic force feedback, system ergonomics, image clarity, and the usefulness of GUI features. |
|||
| Home |

|
||
| Project |

|
||
| People |
|
 |
|
| Gallery |
|
|
|
| Publications |
|
||
| Awards |
|
||
| About |
|
||